Definitions:
-
Axis of rotation ():
Where and are any two points on the axis.
-
Rotation Vector ():
Where rotational speed
-
Distance Vector ():
Where cell centroid, axis of rotation Note: is unique to each cell in the mesh
-
Relative Velocity ():
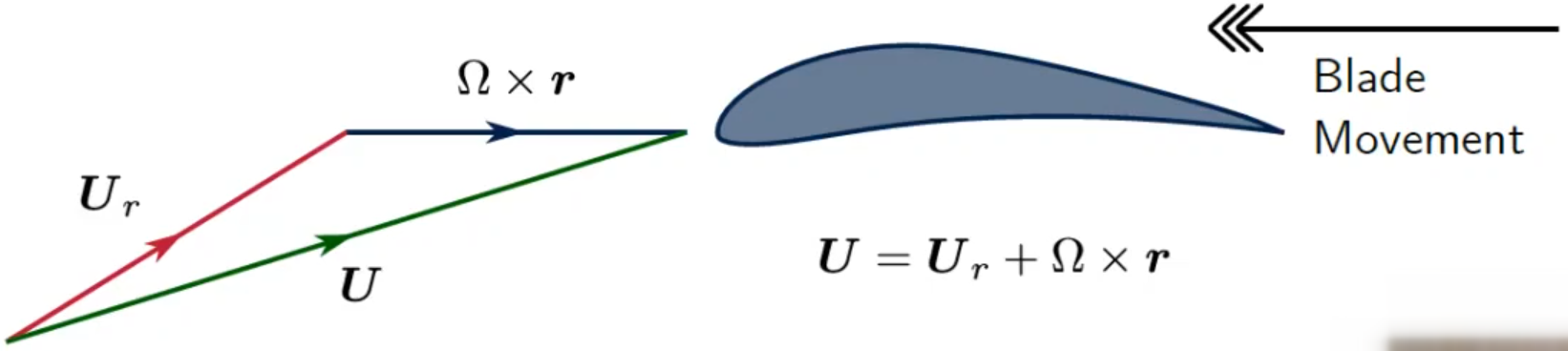
Derivation
Velocity in a frame rotating with the blade
Incompressible Navier-Stokes equations
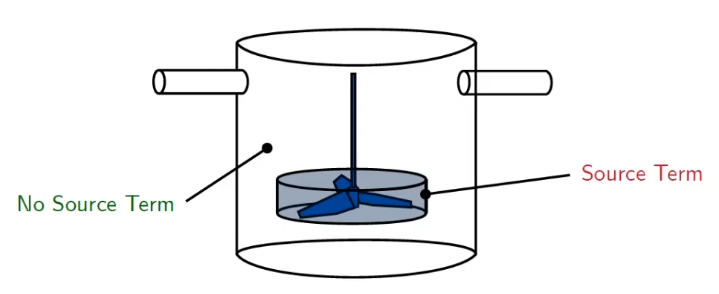
After substitution and simplification,1 we have Single Reference Frame (Frame)
-
We end up with two source terms for the Centrifugal and Coriolis forces
-
Unknown is now the relative velocity,
-
is calculated as a post-processing operation:
Multiple Reference Frames