Task 1
Solution
Constant means the degree is
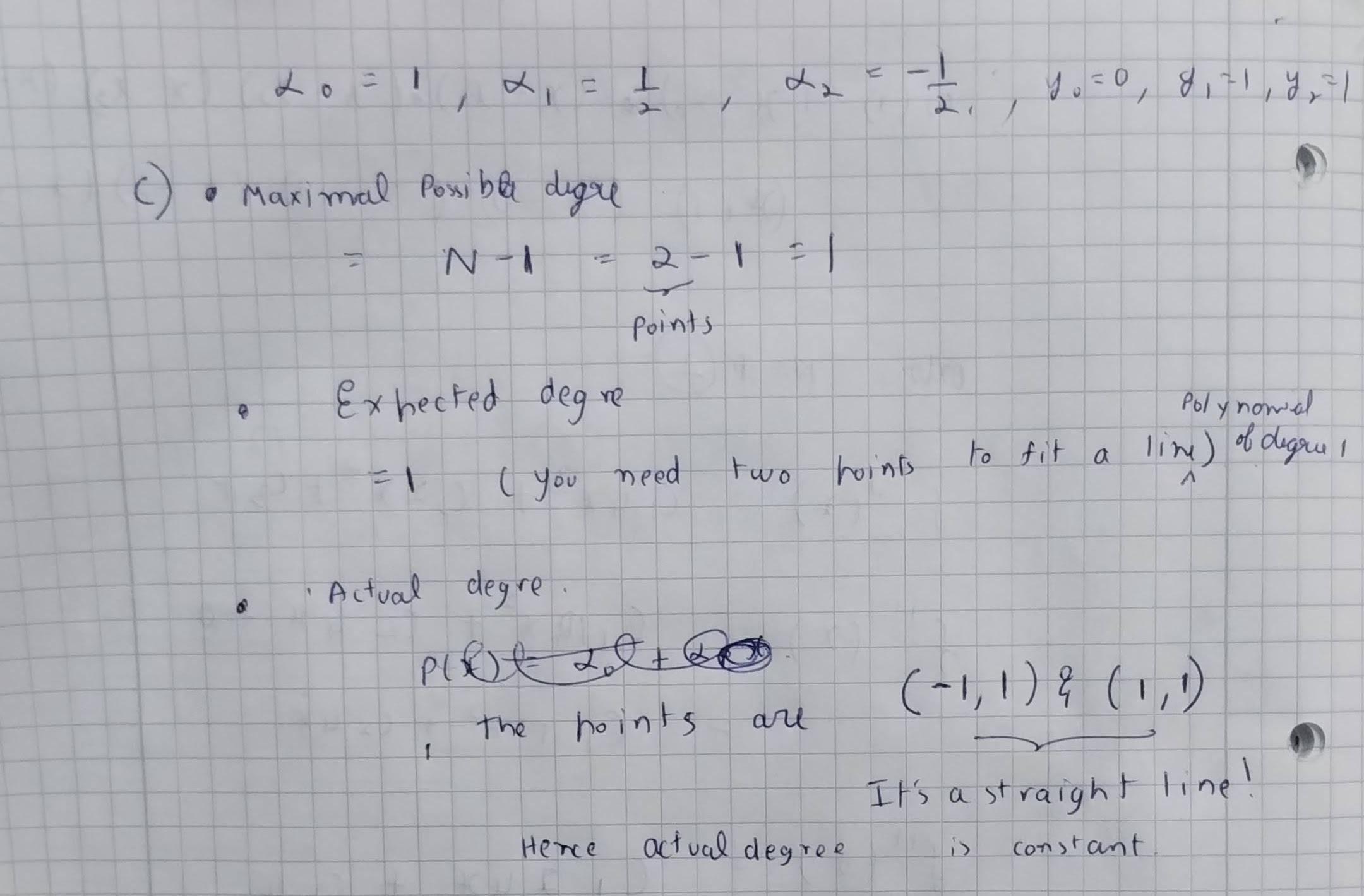
Task 2
Solution
230507 Quadrature - Derivation and Formulae Quadrature error estimation
- Check:
- Therefore
Error bound (in formulary)
For : is a polynomial of degree .
Since the trapezoid rule has degree of accuracy 1, it integrates all polynomials of degree exactly.
Therefore, the quadrature error is exactly 0 .
Exam relevance: Error estimation formulas are frequently tested!
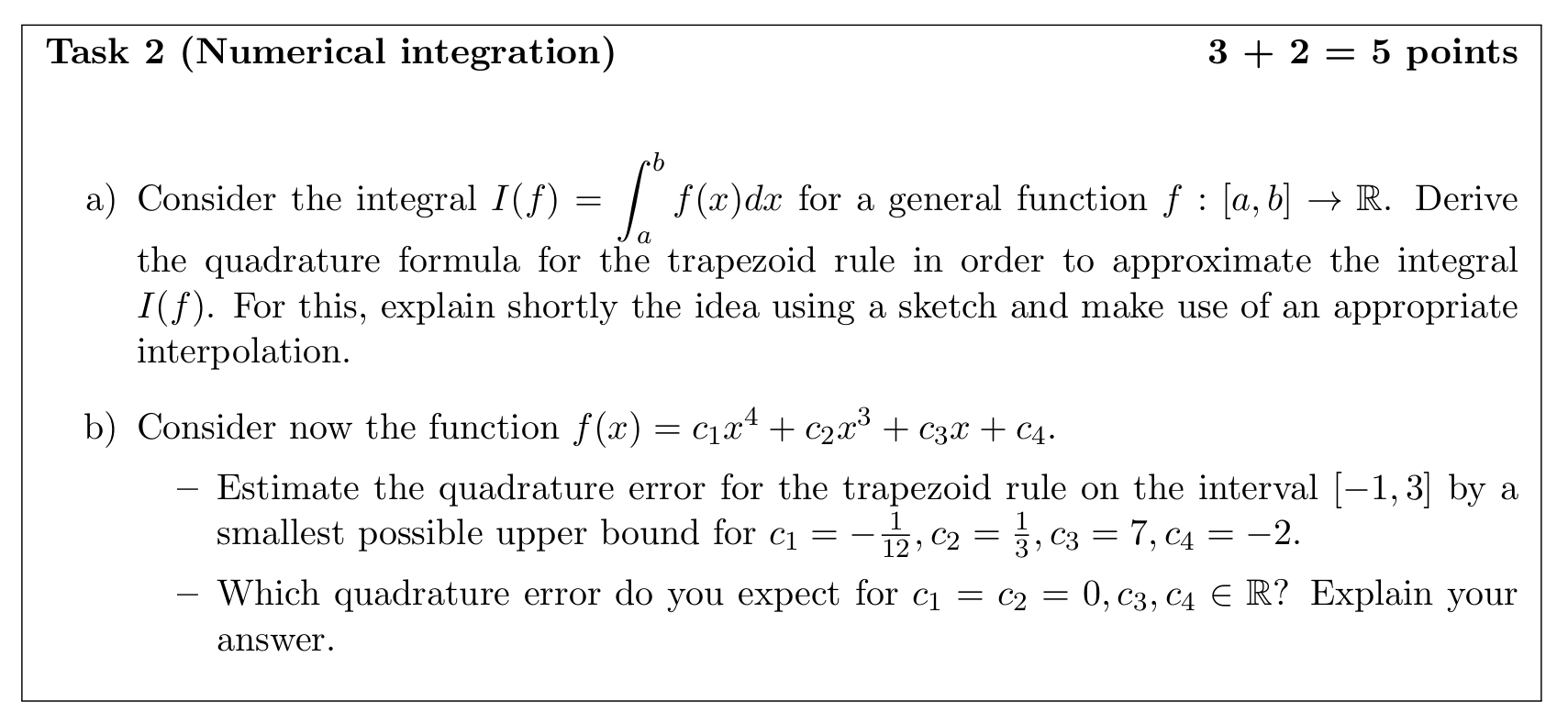
Task 3
Solution
Part (a) - Romberg Extrapolation for Forward Difference Quotient
The forward difference quotient has the form:
From Taylor expansion:
Rearranging, we have
This shows the forward difference quotient has convergence order 1. Applying Romberg extrapolation Let and
Then we have
Using Romberg’s formula with :
Convergence order 2.
Substituting to get the calculation formula:
Common Mistakes
Why do we consider the full Taylor Polynomial?
Because is acts as the Blueprint for the error. Note that in Romberg extrapolation is basically a clever trick to cancel out the errors.
Why expand up to and not directly use the notation?
Same answer as above: We need the term so that we can cancel it out!
Part (b) - Numerical Approximations
For at with :
Exact derivative: , so
Forward difference quotient:
Romberg scheme from (a):
Central difference quotient:
Comparison with exact value :
- Forward difference: (error = )
- Romberg scheme: (error = )
- Central difference: (error = )
The Romberg scheme provides the best approximation, as expected from its higher convergence order.
Task 4 (Nonlinear Equations)
 Note: Newton’s method formulas are available in the formulary.
Note: Newton’s method formulas are available in the formulary.
Part a) Derive Newton’s method from Taylor expansion (1 point)
Taylor expansion of around point :
To find the zero, we set this linear approximation equal to zero:
Solving for gives us the next iterate:
Therefore, Newton’s method is:
Part b) Calculate two Newton steps (2 points)
For , we have Starting from :
Explanation: Newton’s method approximates by its tangent line at each iteration and finds where the tangent intersects the axis.
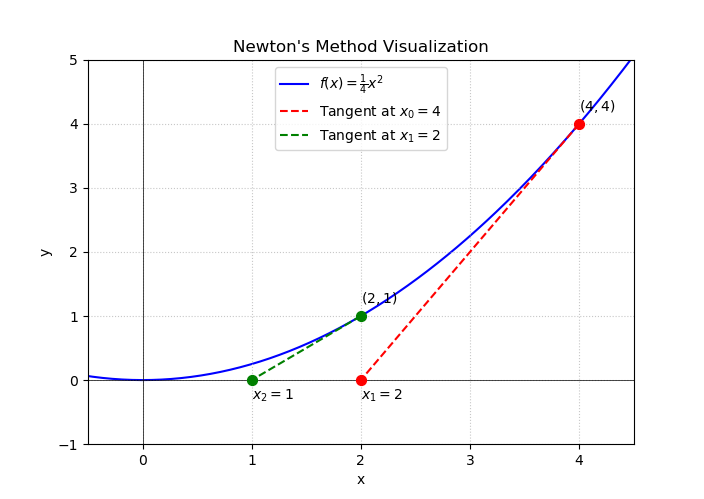 Sketch should show parabola , starting point , tangent line at intersecting axis at , then tangent at intersecting at
Sketch should show parabola , starting point , tangent line at intersecting axis at , then tangent at intersecting at
Part c) Connection to Banach iteration and convergence order (2 points)
-
Convergence order: The derivative of the iteration function is:
At the root where :
Since , Newton’s method has quadratic convergence (order 2) near the root, assuming and exists.
This means the error approximately squares in each iteration: for some constant
Task 5
Solution
a) Maximal Step Size and System Property
The Explicit Euler method is stable if for all eigenvalues , the step size satisfies the condition:
The matrix is upper triangular, the eigenvalues are its diagonal entries:
Since our eigenvalues are real and identical, we only need to solve for :
This inequality can be split into two parts:
Simplifying
Shorthand:Any time you multiply a negative value, the inequalities flip directions. Solving for :
The maximal step size is .
A property of this system is that it is not stiff. A system is considered stiff if the ratio of the largest to the smallest absolute value of the real parts of the eigenvalues is large. Here, the ratio is , which is the opposite of stiff.
b) Two Steps with h = 0.5
The explicit Euler method is given by the formula:
Given , , and .
Step 1: Calculate First, we calculate the product :
Now we find :
Step 2: Calculate First, we calculate the product :
Now we find :
After two steps, the solution is .
Task 5B
Consider differential equation:
a) The Crank-Nicolson method is known to be A-stable. Explain what A-stability implies for the choice of step size when solving this particular system. Is this method a good choice for this system?
b) Perform one step of the Crank-Nicolson method with a step size of to find the approximation .
a) A-Stability and Method Suitability
A numerical method is A-stable if its stability region contains the entire left half of the complex plane, . The Crank-Nicolson method is A-stable.
The eigenvalues of the system matrix are , which are on the negative real axis (i.e., in the left half-plane). Because the method is A-stable, the term will lie within the stability region for any positive step size .
This means that for the Crank-Nicolson method, there is no upper limit on the step size imposed by stability. The choice of can be based purely on the desired accuracy of the solution. This makes it a very robust and good choice, especially for stiff differential equations.
b) One Step of Crank-Nicolson with h = 1.0
The Crank-Nicolson method for a system is given by:
To solve for the unknown vector , we must first rearrange the formula into a linear system of equations:
Given , , and .
1. Set up the linear system: First, we compute the matrices on the left and right sides.
-
Left-Hand Side Matrix:
-
Right-Hand Side Vector:
The system to solve for is:
2. Solve for : Let . We can solve the system using back substitution.
- From the second row: .
- From the first row: .
The solution after one step is:
Task 5C
Consider the differential equation:
a) The implicit Euler method is known to be A-stable. Explain what this implies for the choice of step size when solving this system.
b) Perform one step of the implicit Euler method with a step size of to find the approximation .
Solution
a) A-Stability and Method Suitability
A numerical method is A-stable if its stability region contains the entire left half of the complex plane, . The implicit Euler method is A-stable.
The eigenvalues of the system matrix are , which are in the left half-plane. Because the method is A-stable, the term will always lie inside the stability region for any positive step size .
This means there is no upper limit on the step size for stability. The choice of can be based purely on the desired accuracy of the solution, making the method very robust.
b) One Step of Implicit Euler with h = 1.0
The implicit Euler method is given by the formula:
To solve for the unknown vector , we must rearrange the formula into a linear system of equations:
Given , , and .
1. Set up the linear system: First, we compute the matrix on the left-hand side:
The system to solve for is:
2. Solve for : Let . We can solve the system using back substitution.
- From the second row: .
- From the first row: .
The solution after one step is:
Task 6
a) Definition and Explanation of Consistency
The order of consistency tells us how quickly the error of a numerical method decreases as we make the step size smaller.
In other words for it answers the question “For an an infinitesimally small step, does the given method behave like the actual differential equation?”
This is measured with the local truncation error, , which is the error the method makes in a single step, assuming the starting point was perfectly accurate.
b) Order of Consistency of the Euler Method
c) Order of Consistency of the Euler-Heun Method
Task 7
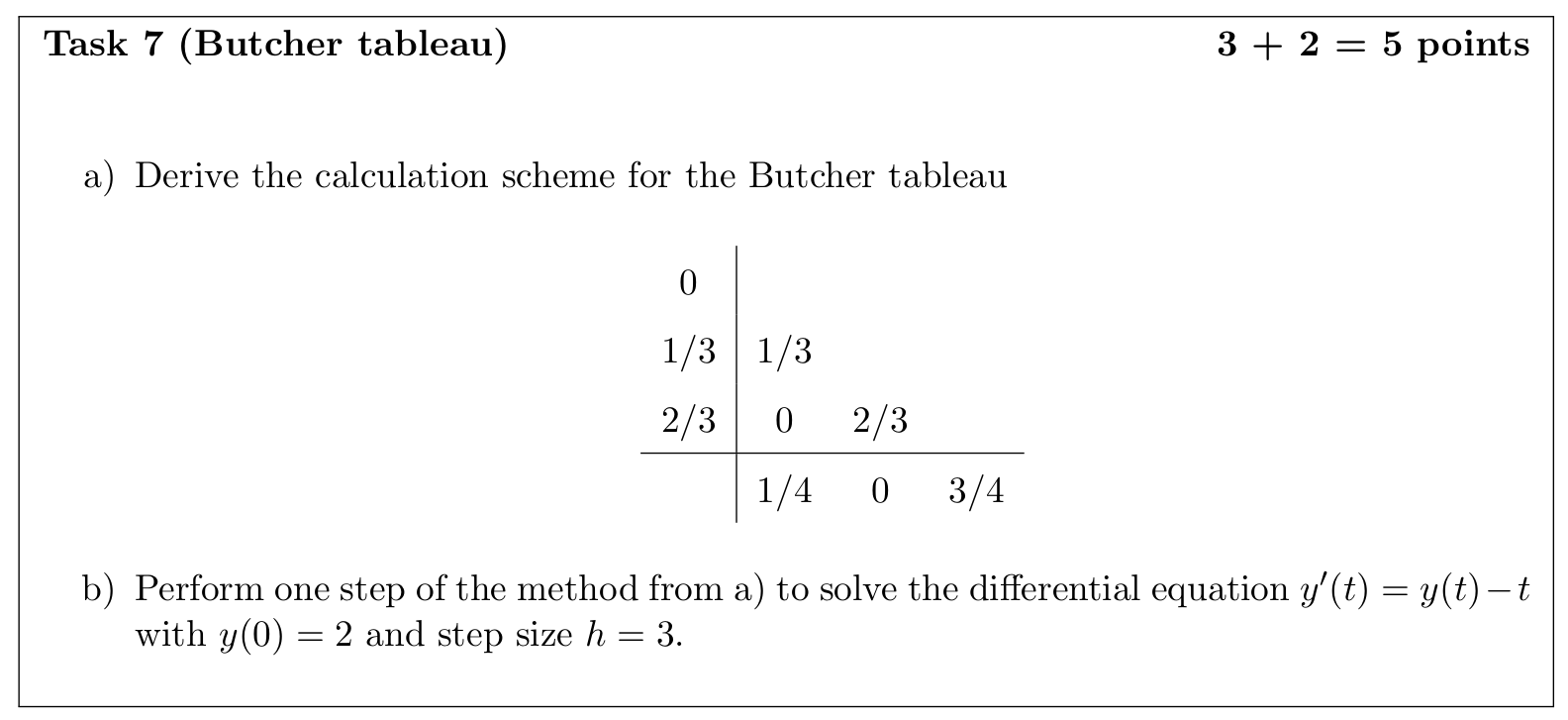
Solution
a) Butcher Tableau
- Nodes : The values in the left column are , , and .
- Matrix : The values in the main triangular part are , , and .
- Weights : The values in the bottom row are , , and .
Complete Calculation Scheme
The complete calculation scheme derived from the Butcher tableau is:
Part b) Calculation
.
Performing One Step (i=0)
-
Calculate Stage 1 (): Evaluate at the initial point .
-
Calculate Stage 2 (): The arguments for are:
-
Time:
-
y-value:
-
.
-
-
Calculate Stage 3 (): The arguments for are:
-
Time:
-
y-value:
-
.
-
-
Calculate Final Update (): Using the calculated stages and :
After one step with step size , the approximate value is .
Task 8
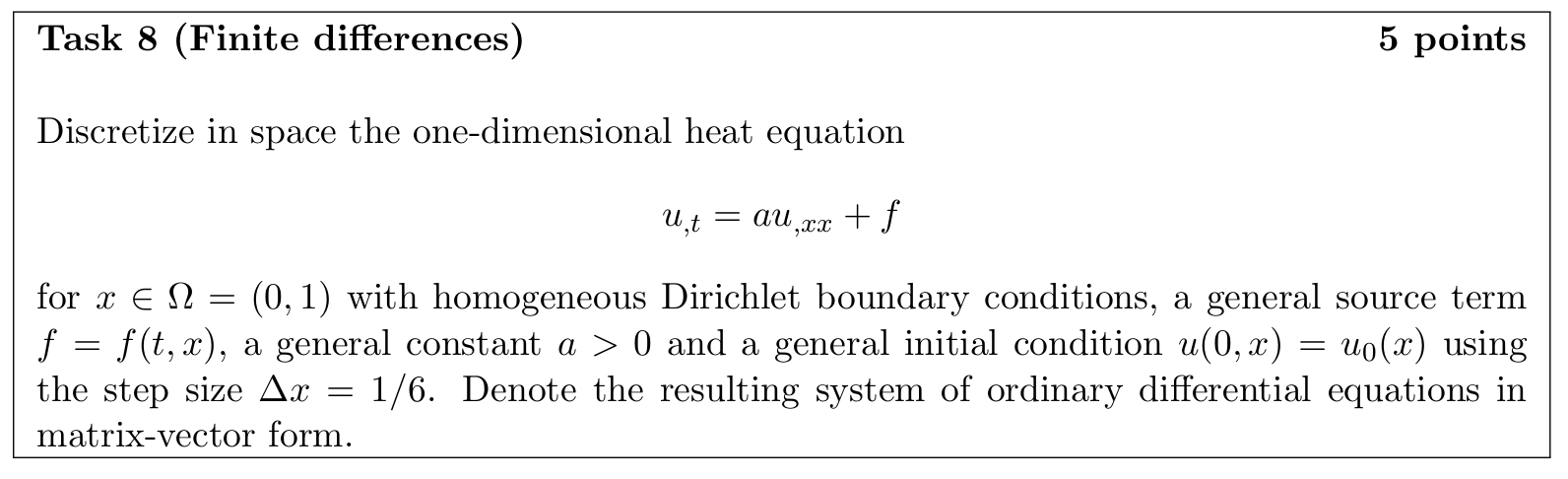 We use a spatial step size of , which creates 5 interior grid points for . The solution at these points is approximated by the time-dependent functions .
We use a spatial step size of , which creates 5 interior grid points for . The solution at these points is approximated by the time-dependent functions .
The second spatial derivative is approximated using the central difference formula:
Substituting this into the PDE and applying the homogeneous Dirichlet boundary conditions ( and ) results in a system of 5 ordinary differential equations.
This system can be written in matrix-vector form as:
With , . The final system is:
The initial condition for this system is .